ŌģÖÖģųĶÚÍŗŧÆŅ§ÅĐąđˇÖÎöĩÄĀĪČËˤĩšŧė˛âËãˇ¨ĩÄŅĐžŋ
Ŋđ ´ŋ1 2 ŖŦ Ōü Ôļ Ņô1
Ŗ¨1.ÖØĮėĶĘĩį´ķŅ§Í¨ĐÅĶëĐÅĪĸš¤ŗĖŅ§ÔēŖŦÎŪĪß´ĢĘäÖØĩãĘĩŅéĘŌ,ÖØĮė400065; 2. ÖØĮėŊđęąŋÆŧŧˇĸÕšĶĐĪŪÔđČΚĢËžŖŦÖØĮė400041ŖŠ
¸ÃÂÛÎġĸąíĶÚĄļŧÆËãģúĶĻĶÃŅĐžŋĄˇ2014ÄęĩÚ31žíĩÚ1ÆÚ
ŋ¯ēÅÎĒŖēISSN 1001-3695
|
ÕĒŌĒÕëļÔ´ĢÍŗͨšũãĐÖĩĀ´Čˇļ¨ĀĪČËĩøĩšŧė˛âËãˇ¨ÖĐĩIJģ×ãēÍĘĶÆĩŧė˛âÖĐČŨŌ×ĐšÂļŌūËŊĩČČąĩãŖŦąžÎÄĖáŗöÁËŌģÖÖģųĶÚÍŗŧÆŅ§ÅĐžöˇÖÎöĩÄĩøĩšŧė˛âËãˇ¨ĄŖ¸ÃËãˇ¨Ö÷ŌĒͨšũĘĩŅéˇÖÎöĀ´ĖáČĄĐĐÎĒĩÄĖØÕ÷Öĩ˛ĸŊ¨ÁĸĖØÕ÷ĪōÁŋŋÕŧäŖŦČģēķĀûĶÃ˛ÉŅųÖĩĶëĐĐÎĒĖØÕ÷ÖĩŋÕŧäĩÄžāĀëĀ´ÅĐļĪÆĨÅä¸ÃĐĐÎĒĘĮˇņÎĒĩøĩš×´ĖŦŋÕŧäĩÄÖĩŖŦÍŦĘąÔÚËãˇ¨ÖĐĖáŗöŌÔÖĮÄÜģúÆ÷ČË×÷ÎĒ¸¨Öúŧė˛âĩÄËŧĪëŖŦ×îēķͨšũĘĩŅéŅéÖ¤Á˸ÃËãˇ¨žßĶĐŊĪēÃĩÄÂŗ°ôĐÔĄŖ
šØŧü´ĘŖēĩøĩšŧė˛âËãˇ¨ŖģÍŗŧÆŅ§ŖģÎĸĩį×ĶŖģ´Ģ¸ĐÆ÷ŖģģúÆ÷ČËŖģ
ÖĐÍŧˇ¨ˇÖĀāēÅŖēTP301.6
An old man fall detection algorithm research based on discriminant analysis of statistical
JIN Chun1 2 ŖŦ YIN Yuanyang 1
(1. Wireless Transmission Key Laboratory, School of Communication and Information EngineeringŖŦChongqing University of Posts and TelecommunicationsŖŦChongqing 400065ŖŦChina; 2. Chongqing Jinou Science&Technology Development Co., Ltd., Chongqing 400041, China)
AbstractŖē In view of the shortcoming of the old man fall detection based on threshold algorithm and detection method based video is easy to leak privacy,this paper proposes a decision analysis fall detection algorithm based on statistics. The algorithm mainly through the experiment to extract the behavior of the characteristic value and establish the characteristic vector space, then use the sampling values and behavior characteristics of space distance to determine whether the behavior for the falling value of the state space. At the same time in the algorithm introducing the idea of intelligent robot as auxiliary detection. Finally, through the experiment shows that the algorithm has good robustness.
KeywordsŖēfall detection algorithmŖģstatisticsŖģmicroelectronicsŖģsensorŖģrobotŖģ
0.ŌũŅÔ
Ëæ×ÅÎĸĩį×ĶģúĐĩĪĩÍŗŖ¨Micro Electro Mechanical SystemŖŦMEMS)ˇĸÕšŖŦÎŪĪß´Ģ¸ĐŧŧĘõĩÄŊø˛ŊēÍÎīÁĒÍøĩÄĐËÆđŖŦĄ°ÖĮÄÜŧŌžĶĄąĄĸĄ°ÖĮÄÜÔļŗĖŌŊÁÆĄąĄĸĄ°ÖĮģÛŗĮĘĐĄąĩÄĪāŧĖĖáŗöŖŦļøĮŌÔÚĄ°ĘŽļūÎåĄąšæģŽÖĐÎŌšúÃ÷ȡĖáŗöĄ°¸ĐÖĒÖĐšúĄąĩÄŋÚēÅŖŦŊøŌģ˛Ŋ´ŲŊøÁËÎŌšúÎŪĪß´Ģ¸Đŧ°ÎīÁĒÍøÁėĶōĩġĸÕšĄŖļøĘĀŊįČËŋÚÕũ×ßĪō¸ßÁäģ¯ŖŦĀĪÄęČËĩÄˤĩšÎĘĖâŊĢŗÉÎĒĘĀŊįĐÔĩÄŌģ¸öÄŅĖâŖŦžŨŌŊÁÆĩ÷˛éĪÔĘžŖēˤĩšĩŧÖÂĩÄËĀÍöŗÉÎĒÎŌšúČËŋÚËĀÍöÂĘĩÄĩÚËÄ´ķŌōËØŖŦŗŦšũ33%ĩÄÉįĮøĀĪČËēÍŗŦšũ60%ĩÄŅøĀĪÔēĩÄĀĪČËÆŊžųÃŋÄęļŧģáˇĸÉúŌģ´ÎˤĩšŖŦÔ¤ŧÆ2030ÄꥰŋÕŗ˛ĀĪČËĄąŧŌÍĨËųÕŧąČĀũŊĢģá´īĩŊ90%[1]ĄŖÄĮČįēÎĖá¸ßĀĪČËĩÄŊĄŋĩÉúģîŖŦÎĒĀĪÄęČËČēĖᚊąãĀûĩÄŌŊÁÆˇūÎņŖŦÔÚˇąÃĻĩÄš¤×÷ÖĐÁËŊâĀĪČËĩÄÉúģîļ¯ĖŦŖŦĘĮŊüÄęĀ´ŅĐžŋĩÄŌģ¸öČČĩãŋÎĖâĄŖČįšûÄÜÕũȡļÔĀĪČËĩÄČÕŗŖÉúģîŊøĐĐŋ´ģ¤ŖŦÕâŊĢļÔÔļŗĖŌŊÁÆĩġĸÕšžßĶĐÖØŌĒŌâŌåŖŦÍŦĘąÄÜ´ķ´ķĖá¸ßÁËŌŊÁÆš¤×÷ĩÄЧÂĘĄŖ
1. ļÔĪÖĶĐĩÄˤĩšŧė˛âËãˇ¨ĩġÖÎö
ÎŪĪßͨĐÅŧŧĘõĩġĸÕšÎĒÔļŗĖŌŊÁÆ[2]ŗÉÎĒÁËŋÉÄÜŖŦĪāĶĻĩÄŌģĐŠĶĐšØ×ÔÖ÷ŧė˛âˤĩš˛ĸÄÜšũŊøĐĐą¨ž¯ĩÄÉ蹸װÖÃŌ˛ĪāŧĖÎĘĘĀŖŦ×îŗŖŧûĩġŊˇ¨žÍĘĮͨšũ˛Éŧ¯ČËĖåÔËļ¯ĘąĩÄĪßŧĶËŲļČŧ°ŊĮËŲļȲĸͨšũĘĩŅéÉčļ¨ÆäãĐÖĩĀ´ŧėŅéËųĐ¯´ø×°ÖÃÕßĘĮˇņˇĸÉúĩøĩš[3Ąĸ4Ąĸ5]ĄŖÄŋĮ°ĶĩĶĐĩÄˤĩšŧė˛âĪĩÍŗŧ°ĪāšØËãˇ¨ŋÉŌÔˇÖÎĒČũĀā[6]ŖēģųĶÚĘĶÆĩĩÄˤĩšŧė˛âĪĩÍŗĄĸģųĶÚÉųŅ§ĩÄˤĩšŧė
˛âĪĩÍŗēÍģųĶÚ´Š´÷ĘŊĩÄˤĩšŧė˛âĪĩÍŗĄŖÔÚÕâČũÖÖˤĩšŧė˛âĪĩÍŗÖĐŖŦĩÚŌģÖÖĘĮͨšũÔÚšĖļ¨ŗĄËų°˛×°ļā¸öÉãĪņ͡Ā´˛ļ×ŊČËĖåĩÄÔËļ¯ĩÄģÃæŖŦÔËĶÃÍŧĪņ´ĻĀíËãˇ¨Ā´Čˇļ¨ĘĮˇņ´æÔÚžßĶĐˤĩšĩÄÍŧĪņĖØÕ÷ŖŦČįŧĶÄôķĩÄCaroline Rougier[7]ÉčŧÆĩÄͨšũÔÚąģŧā˛âÕßŧŌÖĐ°˛×°ĘĶÆĩÉãĪņ͡ŖŦĀûĶÃŧÆËãģúĘĶžõĪĩÍŗĖᚊÁËŌģÖÖˇÖÎöČËĖå×ËĖŦĩÄŊâžöˇŊ°¸ŖŦËûÃĮͨšũŊĢÔËļ¯šũŗĖēÍČËĖåĩÄĐÎĖŦąäģ¯ĪāŊáēĪĩġŊˇ¨ŖŦĖŊ˛âąģŧā˛âÕßĘĮˇņˇĸÉúÁËˤĩšĄŖĩĢÕâÖÖĪĩÍŗĩÄČąĩãĘĮŌōÎĒÉãĪņ͡°˛×°ÔÚšĖļ¨ĩÄÎģÖÃÖģÄÜŊøĐĐļ¨ĩãĩÄŧė˛âŖŦļøČËĖåĘĮŌģ¸öÔËļ¯ĖåŖŦĩąŧā˛âĖåĀëŋĒÉãĪņ͡ËųÄÜ´īĩŊĩġļΧʹžÍÎŪˇ¨ÕũŗŖŧė˛âˤĩšĐĐÎĒĩġĸÉúŖŦÍŦĘą¸ÃĖ×ĪĩÍŗČŨŌ×ĐšÂļąģŧā˛âÕßĩĸöČËŌūËŊŖģĩÚļūÖÖĘĮͨšũÕđļ¯ÉųŌô[6]ĖØÕ÷Ā´ÅĐļ¨ĘĮˇņˤĩšŖŦĶÉĶÚģˇžŗĩĸ´ÔĶĐÔēÍļāÖÖÉųŌôĩĸÉČÅÍŦĘą°˛×°¸´ÔĶŖŦ¸ÃĪĩÍŗÎŪˇ¨žĢȡĩÄÅĐļĪŗöĘĮˇņˤĩšŖŦŌģ°ãÖģÄÜ×÷ÎĒ¸¨ÖúĘŊĩÄŧė˛âŖģÁíÍâŖŦģųĶÚ´Š´÷ĘŊ[3Ąĸ8]ĩÄˤĩšŧė˛âĪĩÍŗĘĮÖ¸ĮļČëÎĸĐÍŋØÖÆĐÍĩÄ´Ģ¸ĐÆ÷É蹸ŖŦ¸ÃÖÖÉ蹸ŋÉŌÔ×ÔĶÉĩÄ´Š´÷ÔÚąģŧė˛âČËÉíÉĪĘĩĪÖĘĩĘąĩÄČĢĖėēōĩÄŧā˛âČËĖåģîļ¯ŖŦĩąČËĖåÔËļ¯ˇĸÉúąäģ¯ĘąÍ¨šũËãˇ¨Ā´ÅĐļĪĘĮˇņˇĸÉúÁËˤĩšĄŖÎÄĪ×[8]ÖĐ×÷Õ߲ÉĶÃČũÖáŧĶËŲļČ´Ģ¸ĐÆ÷˛Éŧ¯ĘũžŨŖŦŧÆËãČũÖáĶëÖØÁĻŧĶËŲļČĩÄŧĐŊĮĀ´Čˇļ¨×ËĖŦÎģÖÃ˛ĸͨšũŋ¨ļûÂüÂ˲¨Ëãˇ¨Ā´Ėá¸ßžĢļČŖŦÎÄĪ×[9]ÖĐ×÷ÕßÔËĶÃŅšÁĻ´Ģ¸ĐÆ÷×öŗÉĐŦĩæĩÄĐÎĘŊŖŦͨšũļÔŅšÁĻĩĸвâĀ´ÅĐļĪĀĪČËĘĮˇņĩøĩšĄŖÎÄĪ× [10]˛ÉĶÃÁËļāÖÖ´Ģ¸ĐÆ÷ŊáēĪÔÚŌģÆđ×îēķͨšũãĐÖĩēÍˤĩšĮ°ēķĩÄĐÄÂĘąäģ¯ŊøĐĐŧė˛âŖŦËäČģÄÜČĄĩÃŊĪēÃĩÄЧšûŖŦĩĢļā´Ģ¸ĐÆ÷ĩÄĐ¯´øÔÚŌģļ¨ŗĖļČÉĪģáÔöŧĶĀĪČËĩÄĐÄĀī¸ēĩŖēÍÍŦĘąËãˇ¨Ō˛ąäĩø´ÔĶĄŖ
ąžÎÄĖáŗöÁËŌģÖÖģųĶÚÍŗŧÆŅ§ÅĐąđˇÖÎöĩÄˤĩšŧė˛âËãˇ¨ŖŦËãˇ¨ÖĐļÔ˛Éŧ¯ĩŊĩÄŧĶËŲļČĘũžŨŊøĐĐ´ĻĀíŖŦŊøŌģ˛ŊͨšũŧÆËãĩÃĩŊČËĖåĮãĩšŊĮļČĩÄąäģ¯ŖŦÍŦʹͨšũ˛âÁŋˇÖÎöČËĖåˤĩšĘąĩÄŊüËÆÄÜÁŋąäģ¯ĮéŋöŖŦͨšũļā´ÎĘÔŅéČĄĩÃˤĩššũŗĖÖвÎĘũĩÄÆŊžųÖĩ×÷ÎĒˤĩšĖØÕ÷ĪōÁŋŋÕŧäŖŦ×îēķͨšũĘÔŅéÖ¤Ã÷Á˸ÃËãˇ¨ĩÄŋÉĐĐĐÔēÍžßĶĐēÜēÃĩÄÂŗ°ôĐÔĄŖ
2.ĩøĩššũŗĖĩÄĖØÕ÷ĐÅēÅĩIJÉŧ¯Ķë´ĻĀí
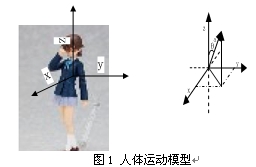
2.1 ČËĖåÔËļ¯ĖØÕ÷ÄŖĐÍĩÄŊ¨Áĸ
ŧĶËŲļČĘĮˇ´ĶĻÎīĖåÔËļ¯ąäģ¯ĩÄ×îēÃĩIJÎŋŧÁŋŖŦļøŧĶËŲļČ´Ģ¸ĐÆ÷ÄÜšģÂú×ãļÔŧĶËŲļČĩÄĘũžŨ˛Éŧ¯ŖŦÕëļÔČËĖåĩÄÔËļ¯ÄŖĐÍŖŦŋÉŌÔ°ŅČËĖåŗéĪķÎĒŌģ¸ö¸ÕĖåŖŦŊ¨ÁĸÄŖĐÍČįÍŧ1ËųĘžĄŖ
ĶÉÍŧ1ŋÉÖĒxĄĸyĄĸząË´Ë´šÖąŖŦŌō´ËŋÕŧäÉĪČÎŌâʸÁŋĩÄąäģ¯ļŧŋÉŌÔͨšũÕâČũ¸öĪōÁŋģųŊøĐĐēĪŗÉŖŦČįĘŊŖ¨1ŖŠËųĘžĄŖ
ÆäÖĐ ´úąíŋÕŧäČÎŌâĪōÁŋŖŦ Ąĸ Ąĸ ˇÖąđÎĒxĄĸyĄĸzÉĪĩÄĩĨÎģʸÁŋĄŖļøČËĖåÔËļ¯ĘąČũÖáĩÄŧĶËŲļČ´Ģ¸ĐÆ÷žÍģá˛úÉúĪāĶĻĩÄąäģ¯ĄŖĶÉÎÄĪ×[8]ŋÉÖĒČËĖåŧĶËŲļȡųÖĩʸÁŋ(sinnal magnitude vector, SVM)ĩÄąäģ¯ŋÉŌÔēÜēÃĩÄÃčĘöČËĖåÔËļ¯ĩÄžįÁŌŗĖļČŖŦSVMĩÄŧÆËãšĢĘŊČįĘŊŖ¨2ŖŠËųĘžĄŖ
ČįšûČũÖáÉĪĩÄŧĶËŲļČŌŅÖĒŖŦŋÉŌÔͨšũĘŊŖ¨3ŖŠŧÆËãŗöČËĖåĩÄ×ËĖŦŊĮļČąäģ¯ĩÄÕũĪŌÖĩĄŖŧŲÉčxĄĸyĶëĩØÃæÆŊĐĐŖŦz´šÖąĩØÃæŖŦžßĖåąíĘžČįÉĪÍŧ 1 ËųĘžŖŦČËĖåÎģÖÃĶëÖØÁĻˇŊĪōĩÄŧĐŊĮÉčÎĒ ŖŦÔō
ÆäÖĐ ŖŦĶÉĶÚÖģŌĒȡļ¨ČËĖå×ËĖŦĩÄąäģ¯ŖŦËųŌÔÔÚąžÎÄÖвģĐčŌĒËãŗöžßĖåĩÄŊĮļČÖĩŖŦÖģĐčËãŗöŗõĘŧ×´ĖŦēÍˤĩšēķĩÄŊĮļČÕũĐūē¯ĘũĩIJîÖĩŧ´ Ā´ēâÁŋČËĖåĮãŊĮąäģ¯ŧ´ŋÉĄŖÍŦĘąÔÚŌ˛ŋÉŌÔͨšũÍĶÂŨŌĮ˛âÁŋČËĖåŊĮļČĩÄąäģ¯ŊøŌģ˛ŊĐŖÕũĶÉŧĶËŲļČ´Ģ¸ĐÆ÷Ëų˛âÁŋŧÆËãĩÄŊĮļČÖĩĄŖ
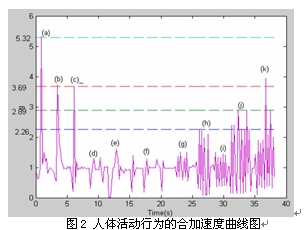
ąžÎÄļÔČËĖåĩÄŧ¸ÖÖĐĐÎĒŊøĐĐÁËĘĩŅéŖŦͨšũļÔ˛Éŧ¯ĩÄĘũžŨŊøĐĐ´ĻĀí˛ĸŧÆËãÁËĘĩŅéšũŗĖÖĐĩĸ÷ÖÖĐĐÎĒĩÄŧĶËŲļȡųļČÖĩŖ¨SVMŖŠČįÍŧ2ËųĘžĩÄĮúĪßÍŧŖŦ×Ũ×øąęĩÄĩĨÎģĘĮgŖŦÆäÍŧÖĐąę×ĸÁ˸÷ÖÖĐĐÎĒĩÄģîļ¯ˇųļČÖĩŖēŖ¨aŖŠĪōĮ°Ë¤ĩš (b) Īōēķˤĩš Ŗ¨cŖŠ ˛āĪōˤĩš (d) Íų¸ßĩĘ×ĶÉĪ×øĪ (e) ÍųąČŊĪĩÍĩÄĩĘ×ĶÉĪ×øĪ (f) ĪÂļ× (g) ÕũŗŖĐĐ×ß (h) ĪÂĀ´ÂĨĖŨŖ¨iŖŠÉĪÂĨĖŨ (j) Ėø (k) ŋėËŲÅÜĄŖ
ÔÚĀĪÄęČËČēÖĐŌģ°ãļŧ˛ģģáĶĐžįÁŌĩÄÔËļ¯ŖŦŧŲÉčÔÚÔËļ¯šũŗĖÖĐŧĶËŲļČ´Ģ¸ĐÆ÷˛Éŧ¯ĘũžŨĩÄĘąŧäÉčÎĒŖ¨0,TŖŠŖŦĶÉĶÚˤĩšĘąŧĶËŲļČÖĩģáĶĐŌģ¸ö˲ąäšũŗĖŖŦŌōļøĩŧÖ¸ÃĘąŧäļÎÄÚĩÄ˲ʹÄÜÁŋĪāĶĻģáÔö´ķ,ÔÚąžÎÄÖвÉĶÃĩÄĘĮ¸÷ÖáŧĶËŲļČĶëĘąŧäΧŗÉĩÄÃæģũēÍĀ´ŊüËÆĩÄąíĘžÔËļ¯šũŗĖÖĐÄÜÁŋĩÄąäģ¯[11]ČũÖáŧĶËŲļȲâÁŋÔËļ¯ÄÜÁŋĪûēÄČįšĢĘŊŖ¨4ŖŠËųĘžĄŖ
ÆäÖĐVŊüËÆ´úąíËųĪûēÄÄÜÁŋĄŖŊáēĪŖ¨2ŖŠĄĸŖ¨3ŖŠĄĸŖ¨4ŖŠĘŊŧÆËãĩÃĩŊĩÄÖĩŖŦžšũļā´Î˛âÁŋēķÔŲĶÉÍŗŧÆˇÖÎöČĄ¸÷ÖĩĩÄÆŊžų×÷ÎĒąžÎÄËãˇ¨ÉčŧÆĩÄĖØÕ÷ĪōÁŋÖĩŖŦ
2.2Ķ˛ŧūĩÄŅĄÔņ
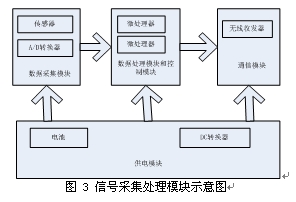
ͨšũ2.1ŊÚÖĐŊ¨ÁĸĩÄČËĖåČũÎŦÄŖĐÍēÍĪāšØˇÖÎö˛ĸŊáēĪ´Ģ¸ĐÆ÷ĩÄš¤×÷ˇŊĘŊŖŦąžÉčŧÆÖвÉĶÃĩÄĘĮÃĀšúInvenSensešĢËžÉú˛úĩÄMPU6050ČũÖáĘũ×ÖŧĶËŲļČÍĶÂŨŌĮ´Ģ¸ĐÆ÷Ā´˛Éŧ¯ČËĖåĩÄÔËļ¯ĘũžŨŖŦ¸Ã´Ģ¸ĐÆ÷ĘĮČĢĮōĩÚŌģŋîÕûēĪ3ÖáÍĶÂŨŌĮĶë3ÖáŧĶËŲļČÆ÷ĶÚĩĨŌģĐžÆŦŖŦĮŌžßĶĐŗŦĩÍšĻēÄŖŦŋÉÔÚ˛ģÍŦĩįŅšÄŖĘŊĪš¤×÷ŖŦ˛âÁŋÄŖĘŊĪÂĩįÁ÷ĩÍÖÁ3.6mAŖŦ´ũģúÄŖĘŊĪÂÎĒ5uAŖŦĶÃģ§ŋÉŅĄĩġֹæÂĘ10ÎģšĖļ¨Ąĸ13ÎģČĢˇÖąæÂĘŖŦÖ§ŗÖŧĶËŲļČŋɲâˇļΧÎĒĄĀ2gĄĸĄĀ4gĄĸĄĀ8gĶëĄĀ16gŖŦˇÖąæÂʲĸËæ×ÅgĩġļΧĖá¸ßļøĖá¸ßĄŖĐžÆŦŧÄ´æÆ÷šÜĀí˛ÉĶÃĩÄĘĮFIFOŧŧĘõŖŦŋÉŌÔŊĢÖ÷ģú´ĻĀíÆ÷¸ēēÉŊĩÖÁ×îĩÍĩČĶÅĩãĄŖĐÅēÅ˛Éŧ¯Ô¤´ĻĀíĩÄģųąžÄŖŋéŋōÍŧČįÍŧ3ËųĘžĄŖ¸ÃĐžÆŦĩÄĘũžŨ˛Éŧ¯ÄŖŋéĶëĀļŅĀÎŪĪß´ĢĘäÄŖŋéĪāÁŦŊĶŖŦͨšũÎŪĪß´ĢĘäŋÉŌÔŧõÉŲ˛ŧĪßĩĸ´ÔĶĐÔēÍÔöŧĶĶÃģ§ĘšĶøÃ×°ÖÃĩÄ×ÔĶÉļČŖŦŧõÉŲĀĪČËĩÄĐÄĀī¸ēĩŖĄŖ¸ÃĐžÆŦÄÚ˛ŋŊĢ˛Éŧ¯ĩÄĘũžŨͨšũI2CĐŌé´ĢĘä¸øĀļŅĀˇĸÉäÄŖŋéŖŦÔŲͨšũĶëĩįÄÔÁŦŊĶĩÄĀļŅĀĘĘÅäŊĶĘÕÄŖŋéŊĶĘÕËų˛Éŧ¯ĩÄĶÃģ§ÔËļ¯ĘũžŨšŠĩĨÆŦģúēÍPC´ĻĀíē͡ÖÎöĄŖͨšũļā´ÎĘĩŅéˇĸĪÖÅå´÷ÔÚČËĖåĩÄŅü˛ŋĘĮ×îĀíĪëĩÄŖŦŌōÎĒŅü˛ŋĪāļÔļøŅÔĘĮÔËļ¯ąäģ¯ˇųļČ×îĐĄŖŦÍŦĘąÄÜÂú×ãĶÃģ§Åå´÷ˇŊąãĩÄŌĒĮķĄŖ
3.Ëãˇ¨ĩÄÉčŧÆËŧĪë
3.1Ëãˇ¨ĩÄËŧĪë¸ÅĘö
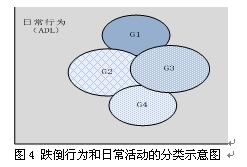
ĘũĀíÍŗŧÆžÍĘĮŅĐžŋČįēÎĶĐЧĩØĘÕŧ¯ĄĸÕûĀíē͡ÖÎöĘÜËæģúŌōËØĶ°ĪėĩÄĘũžŨŖŦļÔËųŋŧ˛ėĩÄÎĘĖâ×÷ŗöÍÆļĪŖŦŊøļøÎĒÖÆļ¨žö˛ßēͲÉČĄĐĐļ¯ĖᚊŋÆŅ§ŌĀžŨĄŖąžÎÄËãˇ¨ÉčŧÆžÍĘĮÔËĶøÃËŧĪëŊøĐĐÉčŧÆĩÄŖŦŌōÍŗŧÆÄŖĘŊĘļąđžÍĘĮͨšũ°ŅĘļąđļÔĪķŗéĪķĩÄąíĘžŗÉĶÉŌģĐŠĖØÕ÷ÖĩššŗÉĩÄĖØÕ÷ĪōÁŋŖŦÕâĐŠĖØÕ÷ĪōÁŋžÍÄÜ´úąíÄŗÖÖļ¯×÷ģōÕßÄŗÖÖĖØļ¨ĩÄĐĐÎĒĖØÕ÷ŖŦŌō´Ë°ŅÄŖĘŊĀāŋÉŌÔŋ´ŗÉĶÉļā¸öĖØÕ÷ĪāËÆĩÄÄŖĘŊ×éŗÉŌģ¸öŧ¯ēĪĄŖÔÚ¸Ãŧ¯ēĪÖĐŋÉŌÔĖáČĄŌģĐŠĖØÕ÷ĘũÖĩššŗÉĖØÕ÷ĪōÁŋĀ´´úąíŌģÖÖÄŖĘŊĀāŖŦÔŲͨšũĖØÕ÷ŋÕŧäļÔ¸÷ÖÖÄŖĘŊŊøĐСÖĀāŖŦÕâŅųžÍŋÉŌÔ´īĩŊĘļąđĩÄЧšûĄŖÍŗŧÆĘļąđËãˇ¨ŋÉŌÔĶÃŊĪĐĄĩÄĖØÕ÷ÁŋĀ´ÃčĘöŌģ¸öļÔĪķĩÄĐĐÎĒŖŦÔÚŌģļ¨ŗĖļČÉĪŊĩĩÍÁËÄŖĐÍĩĸ´ÔĶļČĄŖÔÚĀĪČËˤĩšÖĐĶĐŖēĪōĮ°Ë¤ĩšĄĸĪōēķˤĩšĄĸ×ķ˛āˤĩšĄĸĶŌ˛āˤĩšŖģÍŦĘąģšĶĐČÕŗŖģîļ¯ČįŖē×ß¡ĄĸÉĪĪÂÂĨĄĸ×øĪÂĩČŌģĪĩÁĐĩÄļ¯×÷ĄŖÎĒ´ËŋÉŌÔŊĢĐĐÎĒˇÖÎĒÁŊÖÖŖēˤĩšēÍČÕŗŖĐĐÎĒĄŖÔÚąžÎÄÖĐÖ÷ŌĒŅĐžŋĩÄĘĮļÔˤĩšĮéŋöŊøĐĐÍŗŧÆˇÖĀāŖŦŋÉŌÔ¸ųžŨÍŗŧÆŅ§ÖĐĩÄžāĀëÅĐąđĀ´Čˇļ¨ļ¨ŌåŅųÆˇÖ¸ąęXĩÄšÛ˛âÖĩxŖ¨nÎŦŖŠĩŊ¸ö×ÜĖåĩÄžāĀëŖŦŌÔÆä´ķĐĄĀ´ÅĐļ¨šÛ˛âŅųÆˇĘôĶÚÄĸö×ÜĖåĄŖŌō´ËąžÎÄĩÄËãˇ¨ËŧĪëžÍĘĮģųĶÚÍŗŧÆȡļ¨ŅųÆˇĖØÕ÷ÖĩĪōÁŋČģēķ¸ųžŨžāĀëÅĐąđĩġŊˇ¨Ā´ĘĩĪÖˤĩšŧė˛âĄŖˤĩšĩÄÆŊÃæˇÖĀāČįÍŧ4ËųĘžĄŖÔÚČũÎŦŋÕŧäÃŋÖÖģîļ¯ĐĐÎĒžÍĘĮŌģ¸öÁĸĖåŋÕŧäŖŦG1ĄĸG2ĄĸG3ĄĸG4ˇÖąđąíĘž˛ģÍŦĩÄˤĩšĖØÕ÷ĀāĐÍĄŖ
3.2Ëãˇ¨ÉčŧÆˇŊˇ¨
ÔÚąžËãˇ¨ÉčŧÆÖĐÖ÷ŌĒˇÖÎĒÁŊ´ķĀāŖŦŌģĀāĘĮĩøĩšĘÂŧūĄĸŌģĀāĘĮČÕŗŖÉúģî(ADL)ĘÂŧū(×ß¡ĄĸÉĪĪÂÂĨĄĸ×øĪÂ)ĩČČÕŗŖĐĐÎĒĄŖąžÎÄÖ÷ŌĒŅĐžŋĩÄĘĮˤĩšĘÂŧūŖŦŗũÁËˤĩšÍâÆäËûļŧČĪÎĒĘĮČÕŗŖÉúģîĐĐÎĒŖŦˤĩšĘÂŧūĶÖŋÉŌÔˇÖÎĒG1Ŗ¨ĪōĮ°Ë¤ĩšŖŠG2Ŗ¨ĪōēķˤĩšŖŠG3Ŗ¨ĶŌ˛āˤĩšŖŠG4Ŗ¨×ķ˛āˤĩšŖŠĩČ4ĀāĄŖŅųąžÖĩĘĮÍŗŧÆͨšũ30´ÎĘĩŅéēķĩÄŅųąžĖØÕ÷ÖĩČį2.1ŊÚËųĘžĩġŊˇ¨Įķŗö¸÷ÖÖĀāĐÍĩÄĖØÕ÷ÖĩÔŲČĄĮķÆŊžųŖŦąžËãˇ¨˛ÉĶÃČũÎŦĖØÕ÷Öĩ×éŗÉŌģ¸öŅųąžŋÕŧäŖŦŅųąžÖĩĩÄĘũŅ§ÆÚÍûĪōÁŋˇÖąđĘĮu1Ąĸu2Ąĸu3Ąĸu4ŖŦСŊ˛îžØÕķÎĒ Ąĸ Ąĸ Ąĸ ĄŖļ¨ŌåČũÎŦšÛ˛âĪōÁŋxĩŊ×ÜĖåŅųąžGiĩÄÂíĘĪžāĀëÎĒŖē
ͨšũĘŊŖ¨6ŖŠŋÉŌÔĩÃĩŊĩŊ¸öŅųąžŋÕŧäĩÄžāĀëŖŦļøÔÚÉĪĘöĘĩŅéÖĐžšũÍŗŧÆÆŊžųĩġŊĘŊÉčļ¨ÃŋÖÖĐĐÎĒĩÄĖØÕ÷žāĀëãĐÖĩŖŦČįšûËųĮķŗöĩÄžāĀëÂú×ãšĢĘŊŖ¨7ŖŠŖŦÔōŋÉŌÔȡļ¨¸ÃšÛ˛âÖĩĘôĶÚ¸ÃŅųąžŋÕŧäĄŖĶÉÎÄĪ×[12]ÖĒĩĀÁŊ¸ö¸ÅÄîĩIJîŌėŗĖļČÔŊ´ķŖŦžÍžßĶĐÔŊĐĄĩÄĪāËÆĐÔŖģĩąÁŊ¸ö¸ÅÄî˛ģ´æÔÚ˛îŌėĩãŖŦŧ´ĩąÁŊ¸ö¸ÅÄîĪāÍŦĘąŖŦžßĶĐ×î´ķĩÄĪāËÆĐÔ[12]ŖŦËųŌÔÁŊ¸öĪāËÆļČÔŊŊüĩÄŅųąžŖŦËûÃĮĩÄžāĀëžÍģáÔŊŊĶŊüĄŖ
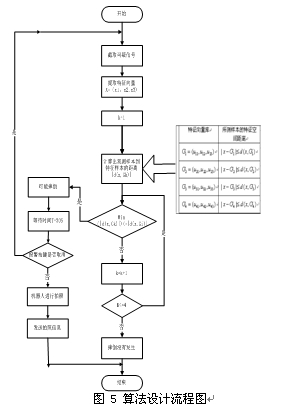
¸ÃËãˇ¨Ö÷ŌĒˇÖŗÉÎå˛ŊŖŦĩÚÁų˛ŊÖ÷ŌĒĘĮĖáŗöŌũČëģúÆ÷ČË×÷ÎĒ¸¨Öúŧė˛âĩÄËŧĪëŖŦͨšũģúÆ÷Č˸¨Öúŧė˛âĀ´ŊøŌģ˛ŊĖá¸ßËãˇ¨ŧė˛âĩøĩšĩÄÕũȡÂĘŖē
1Ąĸ Ŋ¨ÁĸĖØÕ÷ĪōÁŋŋâŖēͨšũĘĩŅéļÔˤĩšĘÂŧūŊøĐСÖĀāÍŗŧÆŖŦ˛ĸŧÆËãŗö¸÷ÖÖĐĐÎĒĩÄĖØÕ÷ŋÕŧäĩÄžāĀëãĐÖĩŖģ
2Ąĸ ŊØČĄŋÉŌÉĐÅēÅŖēŧā˛âČËĖåÔËļ¯ĩÄĘũžŨąäģ¯ŖŦČįŗöĪÖŋÉŌÉĐÅēÅŖŦĖáČĄ¸ÃĐÅēÅŗöĪÖĩÄĮ°ēķ3ÃëÄÚĩÄĐÅēÅŊøĐĐ´ĻĀíŖģ
3Ąĸ ĖáČĄĖØÕ÷ĪōÁŋÖĩŖēͨšũŊØČĄĩÄĐÅēÅͨšũĮ°ĘöˇŊˇ¨ŧÆËãŗö¸÷ĖØÕ÷Öĩ×÷ÎĒšÛ˛âĖØÕ÷ĪōÁŋŖģ
4Ąĸ ŧÆËãšÛ˛âĖØÕ÷ĪōÁŋĶëĖØÕ÷ŋâŅųąžĩÄžāĀëŖģ
5Ąĸ ŊøĐĐÄŖĘŊÆĨÅäŖēͨšũŧÆËãĩÄĖØÕ÷ŋÕŧäžāĀëĀ´Čˇļ¨ĘĮˇņĘôĶÚ¸ÃŋÕŧäˇļΧŖŦČįšûÆĨÅäŗÉšĻÔōÅĐļĪÎĒˤĩšŖŦ˛ĸŊøĐĐą¨ž¯ŗÖĐøĘąŧä30sŖŦÔÚ30ÃëÄÚŋÉŌÔČËÎĒČĄĪûŖģ
6Ąĸ ŧŌÍĨˇūÎņģúÆ÷Č˸¨Öúŧė˛âŖēĩąģúÆ÷ČËĘÕĩŊˤĩšĘąĩÄą¨ž¯ĐÅēÅŖŦģúÆ÷ČËļÔÆäŊøĐĐļ¨Îģ´ĻĀíŖŦČģēķĩŊĘŌÄÚĘ¡ĸĪÖŗĄŊøĐĐÅÄÕÕˇĸËÍŖŦČįšûÔÚ30SÄÚą¨ž¯ĐÅēÅČĄĪûŖŦÔōģúÆ÷Č˲ģĐčŌĒļÔÆäŊøĐи¨Öúŧė˛âĄŖ
žßĖåĪęĪ¸Ëãˇ¨Á÷ŗĖČįÍŧ5ËųĘž
5. ŊáĘøĶī
ąžÎÄͨšũļÔËãˇ¨ŊøĐСÖÎöŖŦĖáŗöÁËŌģÖÖģųĶÚÍŗŧÆŅ§ĩÄÅĐąđˇÖÎöĩÄˤĩšŧė˛âËãˇ¨ĄŖ˛ĸŊĢ¸ÃËãˇ¨Í¨šũļÔČÕŗŖÉúģîļ¯×÷ēÍĩøĩšļ¯×÷ŊøĐĐÍŗŧÆˇÖĀāŖŦȡļ¨¸÷×ÔĩÄĖØÕ÷ŋÕŧäŖŦ˛ÉĶÞāĀëĀ´ŊøĐĐĪāËÆļČĩÄÅĐļĪŖŦ´Ķļøȡļ¨ĐĐÎĒËųĘôĩÄĖØÕ÷ŋÕŧäĀ´ŧė˛âĀĪČËĩøĩšĐĐÎĒĄŖ×îēķͨšũĘĩŅéŊøĐĐÁËŅéÖ¤ŖŦąíÃ÷Á˸ÃËãˇ¨žßĶĐŊĪ¸ßĩÄ×ŧȡÂĘĄŖĩąË¤ĩšĘą¸Ã×°ÖÃŋÉŌÔą¨ž¯ŖŦŌ˛ŋÉŌÔͨšũÍøÂįˇūÎņÆ÷ŊĢČËĖå×ËĖŦĘũžŨ´Ģ¸øÔļŗĖÔÆļËŌŊÁÆŖŦÕâļÔÔļŗĖŌŊÁÆˇūÎņĩġĸÕšžßĶĐÖØŌĒŌâŌåĄŖÍŦĘą¸ÃËãˇ¨ŋÉŌÔͨšũ˛Éŧ¯¸üļāĩÄŅĩÁˇŅųąžĘũžŨĀ´Ėá¸ß×ŧȡļČĄŖÖĮÄÜŧŌžĶĩġĸÕšŖŦ¸øŧŌÍĨˇūÎņģúÆ÷ČË´øĀ´ÁËĐÂĩġĸÕšÁėĶōŖŦÔÚ¸ÃËãˇ¨ÖĐĖáŗöŌÔģúÆ÷ČË×÷ÎĒ¸¨Öúŧė˛âŖŦÄÜŊøŌģ˛ŊĖá¸ßĩøĩšŧė˛âĩÄŊášûŖŦÍŦĘąŌ˛ÄܸüÖąŊĶĩÄšÛ˛ėĘÂĮéĩÄĪÖ×´ŖŦÎĒĀĪČËˤĩšēķŧ°ĘąĩÃĩŊžČÔŽĩÄÔļŗĖŌŊÁÆĖᚊ¸üēÃĩġūÎņĄŖģúÆ÷Č˸¨Öúŧė˛âšĻÄÜĩÄžßĖåĘĩĪÖŊĢÔÚēķĐøš¤×÷ÖĐÍęŗÉĄŖ
˛ÎŋŧÎÄĪ×
[1] ŅîļŦŌļ,ÕÔĶÂ. ÎŌšúŋÕŗ˛ĀĪÄęČËĩÄĪÖ×´ĶëļÔ˛ß[J]. ĪÖ´úÁŲ´˛ģ¤Āí,2004(5):60-62
[2] ŲĄĀöÄČ,ËÎČĢžü,¸đÔËŊ¨.ģųĶÚĘąĐōˇÖÎöĩÄČËĖåˤĩšÔ¤˛âˇŊˇ¨[J]. ÄŖĘŊĘļąđĶëČËš¤ÖĮÄÜ.2012,25(2)Ŗē273-279
[3] LI QiangŖŦSTANKOVIC J AŖŦHANSON M A ,et alŖŽAccurate Fast Fall Detection Using Gyroscopes and Accelerometer Derived Posture Information [c].Proc of the 6th International Workshop on Wearableand Implantable Body Sensor NetworksŖŽBerkeleyŖŦUSAŖŦ2009:138 Ŗ 143
[4] BOURKE A KŖŦLYONS G MŖŽA Threshold Based Fall Detection Algorithm Using a Bi-Axial Gyroscope Sensor[J]. Medical Engineering ŖĻPhysics,2008,30 (1): 84 Ŗ 90
[5] NOURY NŖŦRUMEAUA PŖŦBOURKE A K,et alŖŽ A Proposal for the Clas-sification and Evaluation of Fall Detectors[J].IRBMŖŦ2008ŖŦ29(6):340 Ŗ 349
[6] LUO S H,HU Q M. A dynamic motion pattern analysis apparoch to fall detection[C].IEEE International Workshop on Biomedical Circuits&Systems,2004:53-56.
[7] CAROLINE ROUGIER,JEAN MEUNIER,ALAIN ST-ARNAUD,et al. Monocular 3D Head Tracking to Detect Falls of Elderly People[C]//Proceedings of the 28th IEEE EMBS Annual International Conference,NewYork,USA,2006: 6384-6387.
[8] ÍõČŲŖŦÕÂÔĪŖŦŗÂŊ¨ĐÂĩČ. ģųĶÚČũÖáŧĶËŲļČ´Ģ¸ĐÆ÷ĩÄČËĖåĩøĩšŧė˛âĪĩÍŗÉčŧÆĶëĘĩĪÖ[J].ŧÆËãģúĶĻĶÃ. 2012,32(5)Ŗē1450-1453
[9] Ę¯ĐĀŖŦĐÜĮėĶîŖŦĀ×č´ÄūĩČ. ģųĶÚŅšÁĻ´Ģ¸ĐĩÄĩøĩšŧė˛âĪĩÍŗŅĐžŋ[J].ŌĮÆ÷ŌĮąíŅ§ą¨. 2010, 31(3)Ŗē715-720
[10] ŅĻÔ´ŖŦ¸ßĪōŅô.ģųĶÚļā´Ģ¸ĐÆ÷ĐÅĪĸČÚēĪĩÄĩøĩšŧā˛âĪĩÍŗĩÄÉčŧÆ[J].ÎäēēĀ횤´ķŅ§Ņ§ą¨Ŗ¨ĐÅĪĸĶëšÜĀ횤ŗĖ°æŖŠ. 2011,33(5):712-716.
[11] ÖėšúÖŌŖŦΤ˛ĘēįŖŦÅË Ãô. ģųĶÚČũÎŦŧĶËŲļČ´Ģ¸ĐÆ÷ĩÄČËĖåÔËļ¯ÄÜēÄŧė˛âËãˇ¨ĩÄŅĐžŋ[J]. ´Ģ¸ĐŧŧĘõŅ§ą¨. 2011, 24(8)Ŗē1217-1221.
[12] ÁõĐĀČŲŖŦŅôšâĩČ. ŌģÖÖ¸ÄŊøĩÄģųĶÚŧĶȨÄŖĐÍĩĸÅÄîĪāËÆļČŧÆËãˇŊˇ¨[J]. Îĸĩį×ĶŅ§ĶëŧÆËãģú.2012,29(Ŗ˛)Ŗē13-17
×÷ÕßŧōŊéŖē
Ŋđ´ŋ Ŗ¨1966ĄĒŖŠ ˛ŠĘŋĄĸŊĖĘÚĄĸŅĐžŋÉúĩŧĘĻ Ö÷ŌĒŅĐžŋˇŊĪōŖēÎŪĪßͨĐÅĄĸŧÆËãģúČíŧūĄĸÎīÁĒÍøĩČ
ŌüÔļŅô Ŗ¨1986ĄĒŖŠ ËļĘŋŅĐžŋÉú ŅĐžŋˇŊĪōŖēÎŪĪßͨĐÅŖŦÎŪĪß´Ģ¸ĐÆ÷ÍøÂįĩČ
ͨĐÅĩØÖˇŖēÖØĮėĘĐÄĪ°ļĮøŗįÎÄ¡ÖØĮėĶĘĩį´ķŅ§Í¨ĐÅĶëĐÅĪĸš¤ŗĖŅ§ÔēŖŦÎŪĪß´ĢĘäÖØĩãĘĩŅéĘŌŖŦÎŪĪß´ĢĘäČũ°āŖ¨400065ŖŠ Ŗ¨ŌüÔļŅôŖŠ
|